第三章
3-1「訪れるであろう明日のためにversion1.0」
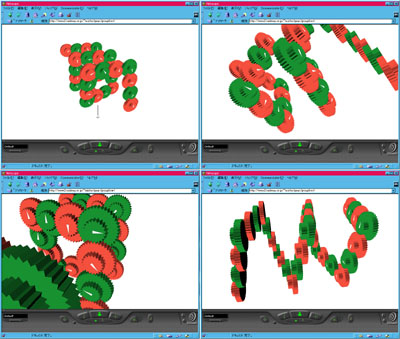
VRML形式のコンピュータ・グラフィックスによって作成されている。ユーザーは、マウスの操作により、視点をスルー移動、任意のアングルから見ることが可能であり、インタラクティブな要素を備えている。
2009年現在、VRML技術は、世界的に、ほぼ廃絶状態にある。
仮想現実の世界では、現実世界でなしえなかった機構の物理的な損傷の回避等、さまざまなことが可能になると思われた。しかし第三者からはそれが現実世界の作品と等価値として受けいれられないことが予想される。画面の中に投影されるモノは幻にすぎないというのが、現代における一般認識である。
「訪れない明日のために」の機構である「RIUE-S」の仮想現実空間内でのデジタル・データ化は、現実的時間に対する挑戦であると同時に、既成の物質的価値観への挑戦でもあると言ってよいかもしれない。現実世界での物理法則を仮想現実の中で超越できたとして、それが何を意味するのかを解き明かしていくことが、今後の課題である。
「訪れない明日のために」においての作品のコンセプトは、「作品を鑑賞する者の時間感覚の変化や個々の時間感覚差について考察する」というものであった。日常的な時間感覚を含む、極大、極小の非日常的時間感覚、さまざまな時間の姿の全てを網羅し、連鎖連動という一つの枠の中に納めることが必要に思われた。では時間の極大化した姿である、23兆9592億41414863.8年から、極小化された姿である、0.04秒という数値的設定は、『「さまざまな時間の幅」の全てを網羅する』という理想を実現していると言えるのであろうか。バックラッシという問題を除外したとして、(37)が1回転するとした時間、23兆9592億41414863.8年という時間単位については極大化を達成できていると言える。極小化においては、現段階では中途という他はない。0.04秒に1回転などという速さで回転する物は現実にいくらでも存在しており、自動車用エンジンのアイドリング並のスピードなのである。私の考え得る限りの極小時間であるゼプト秒(10の−21乗秒)領域で回転する歯車を出現させたい。光の進む速度が秒速30万kmであることから、1ゼプト秒間における光の移動距離を表した。
| |
1ゼプト秒間に光は3fm(3フェムトメートル=3/1000兆メートル)進む。すなわち1ゼプト秒間に1回転する歯車とは、歯車の外周を0.3mと仮定した場合、光速の1兆倍の速度になる。このゼプトという時間単位を時間の極小の姿として用いることに絶対的根拠は無いが、「超高速領域で回転する歯車と超低速領域で回転する歯車を一つの連鎖構造の中に納める」という目的は一応達成できるように思える。 現実世界の作品「訪れない明日のために」において、このような超高速度回転歯車を出現させることは可能であろうか。
現実世界において私が理想とした、現実世界の歯車の連鎖連動構造において、超光速度回転歯車の実現は、古典的な力学上の問題と、物質は光速を超えられないという科学常識から考えても作りえない。では現実世界での力学的法則の及ばない、仮想現実世界においてはどうであろうか。
コンピュータの中に作りだされ、ディスプレイ上に映しだされる仮想現実の空間内において、現実世界の物理法則における能動と受動との力学的関係をプログラム上の設定によって作りだすことができたとしても、力学的関係は不可欠なものではないと考える。「RIUE-S」のデジタル化とは、このような現実世界の力学的常識をも捨て去ることができる手段だと言えるのではないだろうか。
すなわちデジタルの世界では能動と受動の力学的関係を必要としない機構を作りだせると考えた。こう思い至ったのは、現実世界での「RIUE−S」がバックラッシという誤差によって正確な連鎖連動が果たされていないのではないかという疑問が発端である。
仮に現実世界の機構と同じく、連鎖連動によって歯車が回転をおこなうプログラムを作りえたとしても、「訪れない明日のために」での、初期のコンセプトに立ちかえってみれば、時間の極大化と極小化によって作品を鑑賞する者の時間感覚の変化や個々の時間感覚差を考察することに意義が見いだされる。この目的に立つならば、連鎖という構造には、あまり深い意義が無いように思われるのだが。
私は、コンピュータ・グラフィックスのプログラムにおいて、仮想現実空間の中に設置した単体の歯車に1ゼプト秒で1回転し、周回するように設定した。この歯車の映像は、たしかに高速で回転運動をおこなっているように見える。しかし、この超高速度回転をどのように認識し、立証すればよいのか。ディスプレイに映し出されている現象は仮想現実のモノであったとしても、仮想現実を作り出すコンピュータを作動させている電気信号パルスは、現実の現象である。電気信号パルス交信速度が少なくとも光速を超えていなければ、仮想現実で作成された歯車の回転という現象も光速を超えることは不可能なのではないか。では光速を超える速さに設定した仮想現実の歯車はの実際の速さとは?ここで私は連鎖連動構造という個々の歯車の関係を有効に活用したいと考えている。
現実世界の作品「訪れない明日のために」では、各歯車が連鎖連動構造のもとに関係を成立させているという原理において、低速度回転歯車の回転速度から高速度回転歯車の回転速度の割り出しが可能ではないかと考えてい
た。しかし、第二章で述べたように、バックラッシによって連鎖関係の正確性が否定されてしまった。
仮想現実の世界においてバックラッシを排除し、連鎖連動構造を構築し得るのならば、超高速度回転歯車から、超低速度回転歯車、それぞれの速度の立証も可能なのではないか。やはり連鎖連動構造は重要な意義を持っていると考える。 |









